
Engineers at Johns Hopkins university have demonstrated the printing of worm-like gel bots, and have published their findings in a paper. The robotic worms are capable of uni-directional locomotion thanks to the expansion and contraction of their gel-bodies during thermal cycling.
Read on to know more about the printed gel bots.
Soft Robots
The worms are inspired by inch-worms in the way their movement appears to undulate, pushing the creature along. Hydrogel structures have previously been printed that demonstrate the ability to expand and contract when undergoing thermal cycling.
The Johns Hopkins team has applied this principle to the small robots, and this enables the robots to move in one direction across a flat plane. You can see the robot moving in the clip below.
The gel bot is a type of soft robot, and in this case, a very soft robot. Soft robotics is a rapidly growing field that involves the design and development of robots that are made primarily from flexible materials. These robots can take on a wide range of shapes, sizes, and forms, and are capable of performing a variety of tasks, from simple grasping and manipulation to more complex tasks such as swimming, flying and crawling, as you can see with the gel bot.
Soft robots have many advantages over traditional hard robots, including greater flexibility, adaptability, and the ability to safely interact with their environment. They are being researched and developed for use in a wide range of applications, from manufacturing and healthcare to search and rescue and even space exploration.
Untethered
The gel soft robot differs from many soft robot examples, as the robot has no power supply, and so can operate untethered, receiving its energy to move from the temperature of the fluid environment in which it sits.
By fluctuating the surrounding temperature between 30 and 60 degrees Celsius, the robot moves thanks to the geometry of the hydrogel structure.
The robot consists of hydrogel layers, namely an active thermoresponsive poly(N-isopropylacrylamide) (pNIPAM) and passive polyacrylamide (pAAM) bilayers with suspended linkers.
The motion was simulated using finite element analysis, and confirmed by use of finite element simulations, and experiments were performed where parameters such as linker stiffness and the number of bilayer segments were varied. The experiments were monitored visually using motion cameras.
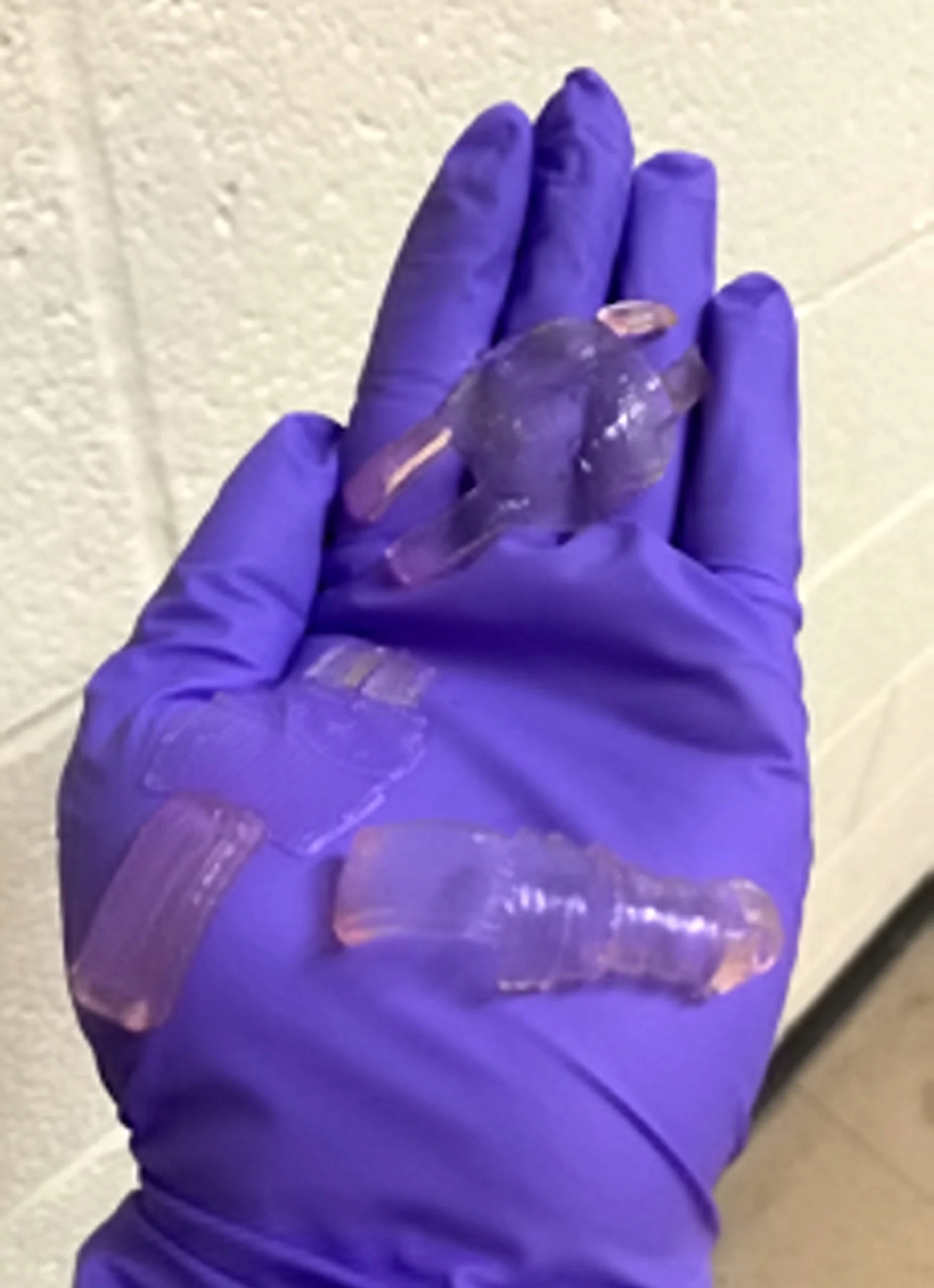
You can see the gel bots in the image below for scale.
It is hoped that the robots can find application in biomedical domains, where the robots could be used to deliver drugs to targeted sites within the human body, where their motion could potentially be controlled with human biomarkers and biochemicals.
“It seems very simplistic but this is an object moving without batteries, without wiring, without an external power supply of any kind—just on the swelling and shrinking of gel,” said David Gracias, researcher and professor at Johns Hopkins University.
“Our study shows how the manipulation of shape, dimensions and patterning of gels can tune morphology to embody a kind of intelligence for locomotion.”
Moving forward, the researchers plan to print the gel bots in different geometries, and add cameras and other sensors to the body, although it is not stated how these devices will be powered.
The research paper, titled “Untethered unidirectionally crawling gels driven by asymmetry in contact forces” is available for your perusal in the Science Robotics journal at this link.









