Harvard and Seoul National University researchers have created a new soft robotic system called “link-bots” that can perform coordinated movements without embedded power or control systems. The robots consist of 3D-printed centimeter-scale particles connected in V-shaped chains via notched links. When placed on a vibrating surface, the tilted legs of each particle allow the bots to self-propel and demonstrate collective behavior.
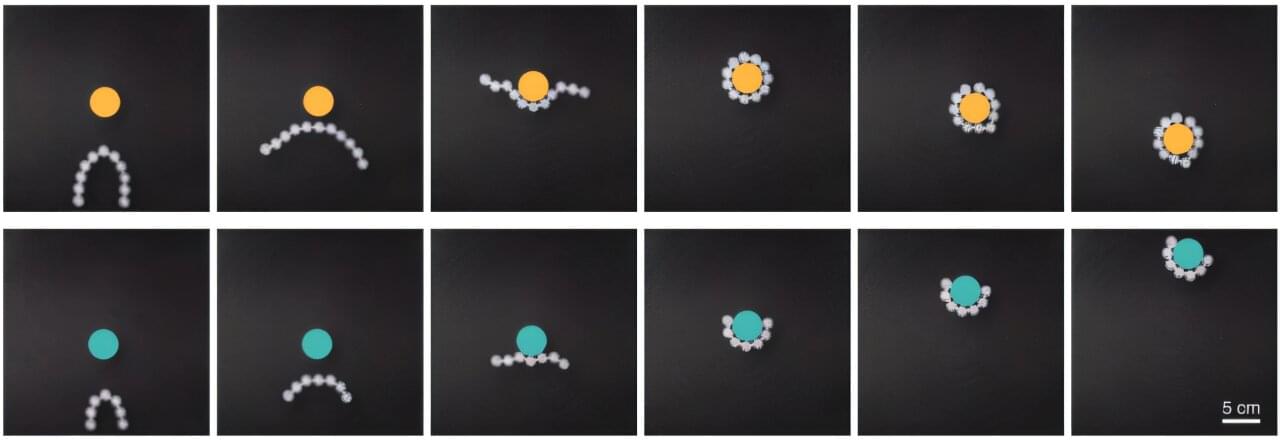
The link-bots represent an alternative approach to traditional swarm robotics, which typically rely on energy-intensive components like sensors and wireless communications. These simple mechanical robots can collectively move forward, stop, change direction, squeeze through gaps, and transport objects. Multiple link-bots can work together to accomplish tasks that would be difficult for a single robot.
“From a physical and computational perspective, the interactions between link-bots are really simple, even though they display what look like very complex behaviors,” said L. Mahadevan, the Lola England de Valpine Professor at Harvard SEAS. “With a large number of these agents, you get a range of emergent behaviors.”
The research team developed a computational model to understand how different link designs and particle counts affect movement. SEAS postdoctoral fellow Kimberly Bowal, who created the model, stated: “It has been exciting to show that physical linking constraints alone can drive programmable, environment-responsive collective behaviors.”
According to the researchers, the principles demonstrated by the link-bots could potentially enable applications from sorting mechanisms to transport of passive objects. Mahadevan described the approach as “the opposite of planned engineering,” highlighting how complex functional behaviors can emerge from simple interactions without centralized control.
The study was published in Science Advances and co-authored by researchers from both Harvard SEAS and Seoul National University’s Department of Mechanical Engineering.
Source: seas.harvard.edu