In our article on silicone 3D printing, we mentioned that soft robotics is benefiting from the technology. Soft robotics are actuated motion systems that are soft rather than rigid; they’re usually powered by air, water, electricity, heat, and even light. To demonstrate how printed soft robotics has led to the development of soft pneumatic sensing chambers (SPSCs), and to celebrate the season, Charbel Dalely Tawk at the ARC Centre of Excellence for Electromaterials Science, University of Wollongong puts on a riveting performance of the Christmas-time classic Jingle Bells on a 3D printed SPSC piano.
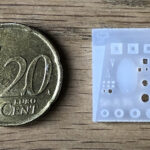
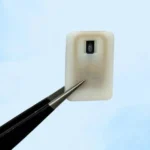
The SPSCs were 3D printed in thermoplastic polyurethane (TPU) on a standard desktop 3D printer and they are sensitive to four mechanical inputs: compression, bending, torsion, and rectilinear displacement, all of which can cause pressure changes in the SPSCs to trigger an action. In this case, that action is simply playing a specific tone. Soft pneumatic sensors have many advantages, including fast response, repeatability, reliability, low power consumption, and long lifetime. They take up much less space than the bladders required for some soft robotics systems, and they don’t use expensive conductive inks either. The printed SPSCs also require no support material or post-processing, making them fast and efficient to fabricate.
Soft robotics provide many benefits over traditional rigid robotics, with one of the most obvious being safety. When humans regularly interact with robotic systems, they can be injured by colliding with their hard metals and composite materials. A robotic arm made of silicone is much less likely to cause a concussion in the case of a collision. Dexterity is also improved with soft robotics because softer materials can flex and bend at more points.
These printed SPSCs cost only a few cents to produce but the researchers really got their money’s worth because they sustained 150,000 activation cycles without failure. The researchers designed a few variations of the sensors, such as a glove for a human hand that can track and visualize the position of each finger. The glove was then linked to a three-finger soft robotic gripper that could be directly controlled by the wearer of the glove. Such a system would be ideal for VR (virtual reality) and AR (augmented reality) environments. The soft joystick they created would likewise work well in gaming applications. The creators of the SPSCs see them being used in interactive robotic platforms for STEM education, haptic devices for rehabilitation, VR, and human motion tracking systems.