A team at North Carolina State University developed mesh robots by 3D printing silicone architectures with programmable magnetic capillary action. As a result, they’ve developed smart elastomeric structures that reconfigure and reshape in reaction to magnetic fields. The robots can thus pick things up or partake in small actions that could be useful in developing soft robotics or medical tools.

While the robots are best for simpler tasks, they are just an early prototype, as the researchers suggest. “This research shows capabilities in the emerging field of combining 3D printing and soft robotics,” says Orlin Velev, corresponding author of the study. “For now, this is an early stage proof-of-concept for a soft robotic actuator.”
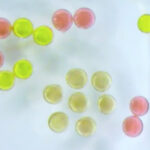
The ultrasoft actuators deform upon interaction with magnetic forces, causing carbonyl iron particles inside them to release or contort. One of the proof of concepts that the researchers presented was a mechanism for holding water droplets. While the magnetic field is on the robot holds on to the droplets and releases the when the field switches off. The design could this be a great way of transporting liquids or mixing them in lab situations.
Floating, Controllable Mesh Structures
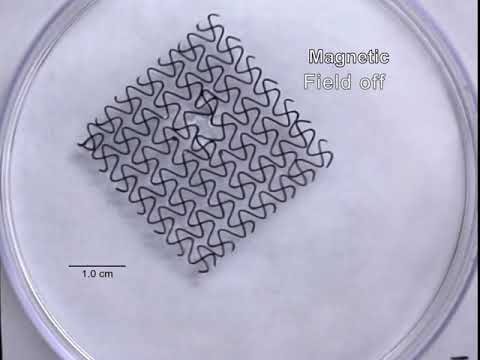
The robots consist of silicone microbeads, liquid silicone, water and the magnetisable iron carbonyl particles. Although it’s a magnetic robot, it is also a great example of 4D printing technologies. Due to its ability to interact in unique ways with magnets, the researchers used a couple of different arrangements for varying purposes. For example, they also developed a claw grabber (as shown in the video below).
The grabber has a structure in the form springs with a claw at one end. When the magnetic field is on, the spring section bunches up, dragging the claw with it. Disabling the field allows the researchers to extend the claw out, grab a small ball of aluminum, dragging it in. It’s a very simple mesh robot system but it’s also effective.

As the research abstract states:
3D printing allows us to fabricate soft architectures with different actuation modes, such as isotropic/anisotropic contraction and multiple shape changes, as well as functional reconfiguration. Meshes that reconfigure in magnetic fields and respond to external stimuli by reshaping could serve as active tissue scaffolds for cell cultures and soft robots mimicking creatures that live on the surface of water.
Building the mesh robots took quite some ingenuity in terms of printing. The researchers built their own 3D printer for the experiment using the design of a CNC mini‐mill from OpenBuilds. They customized it to use a Nordson EFD syringe-barrel rather than a typical CNC spindle. Pneumatic pressure on the syringe barrel was regulated with a Performus V Fluid Dispenser providing controlled extrusion. This was necessary as they were using a 27‐gauge polyethylene nozzle. Movement in the x-y-z directions was controlled by an Arduino Mega 2560 microcontroller board equipped with a Ramps 1.4 driver board.
Featured images courtesy of University of North Carolina.