Harvard researchers have developed a 3D printing technique that programs soft filaments to bend, twist, expand, or contract in response to heat, producing what the team calls artificial muscles. The work, published April 29 in the Proceedings of the National Academy of Sciences, comes from the lab of Jennifer Lewis, the Hansjorg Wyss Professor of Biologically Inspired Engineering at Harvard’s John A. Paulson School of Engineering and Applied Sciences.
The method, called rotational multimaterial 3D printing, works by extruding two materials side by side through a rotating nozzle: an “active” liquid crystal elastomer that contracts along its molecular alignment direction when heated above a transition temperature, and a “passive” elastomer that holds its shape regardless of temperature. Because one side shortens and the other resists, even a simple bilayer filament bends. Rotating the nozzle as it prints writes a helical molecular alignment into the filament, letting the researchers precisely pre-program how it’ll deform when activated. No post-processing is required.
The team has already printed filaments as small as roughly 100 microns in diameter. First author Mustafa Abdelrahman, a postdoctoral researcher, said he was drawn to the platform’s flexibility: “I saw this really beautiful [rotational 3D printing platform] and thought, ‘What if we plug in active materials and pattern them within the filament — can we drive shape change that way?'”
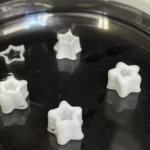
Working with those individual filaments as building blocks, the researchers constructed flat lattices capable of acting as temperature-controlled filters: heat them, and the lattice opens to let spherical particles pass through; cool them, and it contracts to trap or support the particles. They also built pick-and-place grippers, free-standing lattices that can be lowered onto multiple rods, heated to grip and lift them, then cooled to release. In one test, a lattice printed with alternating expanding and contracting regions morphed into a dome-like shape when heated in an oil bath, matching the form predicted by simulations.
Graduate student and co-author Jackson Wilt pointed to further possibilities: “In terms of scalability, you could create more complex nozzles that integrate with other materials in the future — like, having a liquid metal channel to enable actuation, or integrating other functionality.”
The work was validated in collaboration with Professor L. Mahadevan, whose group focuses on the mechanics of natural structures, and Professor Joanna Aizenberg, whose lab characterized the liquid crystal elastomers’ molecular alignment using X-ray scattering at Brookhaven National Laboratory. “This filament design and printing framework could accelerate the transition of artificial muscle-like materials from the lab to real-world technologies,” Lewis said.
Potential applications include soft robotic grippers that can manipulate multiple objects at once, active valves whose flow pathways can be tuned with temperature, and injectable filaments that lock together to form porous, high-surface-area structures for biomedical uses such as rapid tissue clotting. The Harvard Office of Technology Development has already moved to protect the research and is pursuing commercialization. Federal funding came from the NSF through the Harvard MRSEC (DMR-2011754) and the ARO MURI program.
Source: seas.harvard.edu